虚仿中心相关实验项目实验指导书
35KV示范变电站倒闸操作虚拟仿真实验指导书
1)实验目的
通过相关内容的学习可以让学生掌握电气运行倒闸操作的知识和技能,掌握填写倒闸操作票的基本原则和方法,熟练操作各种断路器,掌握停电验电,设置与拆除接地线等安全措施的方法。同时,学习倒闸操作过程可以将前序课程与本课程融会贯通,让学生明确电力系统电气运行与调度的重要性,打下相关的理论基础,培养学生工程素养。
2)实验内容
倒闸操作;系统的主接线图和各二次保护屏图形上的开关、刀闸、保护压板、切换把手等进行变位操作;挂地线、拆地线等状态检测。
3)实验原理
35kV示范变电站倒闸操作虚拟仿真系统是模拟电气倒闸操作票及其操作过程的虚拟仿真系统。系统开出操作票后,进入模拟预演子模块,进行模拟操作;使用鼠标,在计算机屏幕上模拟变电站的倒闸操作,按操作票,逐项对系统的主接线图以及断路器、隔离开关、保护压板、切换把手等进行变位操作,进行状态检查、挂地线、拆地线等模拟操作;并且,在硬件上,计算机主机与由微机控制的模拟盘相连接.屏幕上主接线图的开关、刀闸变位,模拟盘上的开关、刀闸也跟随变位。产生形象直观的效果:平时无操作任务时。学生实验时,系统进行正确性检查学生操作正确性,从而判断学生对基础知识及行业认识性。35kV示范变电站倒闸操作虚拟仿真系统完成了操作票和倒闸操作,以及上述操作的虚拟仿真。
4)实验方法与步骤要求
① 实验时,系统确定学生通过输入姓名和学号相互匹配,开始实验:

② 进入系统后,学生应查看操作表,熟悉操作表流程:

③ 按照操作票的提示,找到控制柜:

④ 在控制柜上完成各种检查:

⑤ 完成倒闸操作:

⑥ 学生交互性操作步骤说明:
本系统可根据实验内容进行调整,系统学生交互性操作步骤案例如下:
1 |
拉开至第一开闭站生活区215开关 |
|
1.1 |
找到215柜子(上面写有:至第一开闭站生活区;机柜类型2) |
移动抵达 |
1.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
1.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
1.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
1.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
1.6 |
结论说明:经检查,215开关已拉开! |
弹窗说明,点击确定进入下一步 |
|
2 |
拉开至第一开闭站教学区214开关 |
|
2.1 |
找到214柜子(上面写有:至第一开闭站教学区;机柜类型2) |
移动抵达 |
2.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
2.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
2.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
2.5 |
检 分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
2.6 |
结论说明:经检查,214开关已拉开! |
弹窗说明,点击确定进入下一步 |
|
3 |
拉开至大学软件园213开关 |
|
3.1 |
找到213柜子(上面写有:至大学软件园;机柜类型2) |
移动抵达 |
3.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
3.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
3.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
3.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标 击 |
3. |
结论说明:经检查,213开关已拉开! |
弹窗说明,点击确定进入下一步 |
|
4 |
拉开至艺术学院1号柜212开关 |
|
4.1 |
找到212柜子(上面写有:至艺术学院1号柜;机柜类型2) |
移动抵达 |
4.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
4.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
4.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
4.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
4. |
结论说明:经检查,212开关已拉开! |
弹窗说明,点击确定进入下一步 |
|
5 |
拉开至艺术学院13号柜314#线 |
|
5.1 |
找到211柜子(上面写有:至艺术学院13号柜314#线;机柜类型2) |
移动抵达 |
5.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
5.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
5.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
5.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
5.6 |
结论说明: 检查,211开关已拉开! |
弹 说明, 击确定进入下一步 |
|
6 |
拉开201开关,并将小车由运行位置拉至试验位置 |
|
6.1 |
找到201柜子(上面写有:至艺术学院13号柜314#线;机柜类型2) |
移动抵达 |
6.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
6.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
6.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
6.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
6.6 |
将小车摇至试验位置 |
模型闪烁提示,鼠标点击 *出现摇柄,转动360度后消失(期间不准重复点击) |
6.7 |
打开柜门 |
模型闪烁提示,鼠标点击 *柜门顺势打开135度(期间不准重复点击) |
6.8 |
拔下小车插件 |
模型闪烁提示,鼠标点击 *直接切换成取下后的管道状态(不模拟动画过程) |
6.9 |
拉出小车 |
模型闪烁提示,鼠标点击 *实现拉出动作(期间不准重复点击) |
6.10 |
结论说明:经检查,301开关已拉开,并已拉至试验位置。 |
弹窗说明,点击确定进入下一步 |
|
7 |
合上245开关 |
|
7.1 |
找到245柜子(上面啥都不写;机柜 型2) |
移动抵达 |
7. |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
7.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
7.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
7.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
7.6 |
结论说明:经检查,245开关已合上! |
弹窗说明,点击确定进入下一步 |
|
8 |
合上至第一开闭站生活区215开关 |
|
8.1 |
找到215柜子(上面写有:至第一开闭站生活区;机柜类型2) |
移动抵达 |
8.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
8.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
8.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
8.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
8.6 |
结论说明:经检查,215开关已合上! |
弹窗说明,点击确定进入下一步 |
|
9 |
合上至第一开闭站教学区214开关 |
|
9.1 |
找到214柜子(上面写有:至第一开闭站教学区;机柜类型2) |
移动抵达 |
9.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
9.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
9.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
9.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
9.6 |
结论说明:经检查,214开关已合上! |
弹窗说明,点击确定进入下一步 |
|
10 |
合上至大学软件园213开关 |
|
10.1 |
找到213柜子(上面写有:至大学软件园;机柜类型2) |
移动抵达 |
10.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
10.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
10.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
10.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
10.6 |
结论说明:经检查,213开关已合上! |
弹窗说明,点击确定进入下一步 |
|
11 |
合上至艺术学院1号柜212开关 |
|
11.1 |
找到212柜子(上面写有:至艺术学院1号柜;机柜类型2) |
移动抵达 |
11.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
11.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
11.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
11.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
11.6 |
结论说明:经检查,212开关已合上! |
弹窗说明,点击确定进入下一步 |
|
12 |
合上至艺术学院13号柜314#线 |
|
12.1 |
找到211柜子(上面写有:至艺术学院13号柜314#线;机柜类型2) |
移动抵达 |
12.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *分闸切换为合闸,上方绿灯灭黄灯亮,电路表切换为有数字的,高压带电显示器灯亮 |
12.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
12.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
12.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
12.6 |
结论说明:经检查,211开关已合上! |
弹窗说明,点击确定进入下一步 |
|
13 |
拉开301开关,并将小车由运行位置拉至试验位置 |
|
13.1 |
找到301柜子(上面啥都没写;机柜类型1) |
移动抵达 |
13.2 |
检查分合闸开关 |
模型闪烁提示,鼠标点击 *合闸切换为分闸,上方绿灯亮黄灯灭,电路表切换为0,高压带电显示器灯灭 |
13.3 |
检查电子电路表 |
模型闪烁提示,鼠标点击 |
13.4 |
检查高压带电显示器 |
模型闪烁提示,鼠标点击 |
13.5 |
检查分闸、合闸指示灯 |
模型闪烁提示,鼠标点击 |
13.6 |
将小车摇至试验位置 |
模型闪烁提示,鼠标点击 *出现摇柄,转动360度后消失(期间不准重复点击) |
13.7 |
打开柜门 |
模型闪烁提示,鼠标点击 *柜门顺势打开135度(期间不准重复点击) |
13.8 |
拔下小车插件 |
模型闪烁提示,鼠标点击 *直接切换成取下后的管道状态(不模拟动画过程) |
13.9 |
拉出小车 |
模型闪烁提示,鼠标点击 *实现拉出动作(期间不准重复点击) |
13.10 |
结论说明:经检查,301开关已拉开,并已拉至试验位置。 |
弹窗说明,点击确定实验结束,进入结果界面 |
5)实验结果与结论要求
§是否记录每步实验结果:R是 £否
§实验结果与结论要求: R实验报告£心得体会
§其他描述:
实验结束之后,系统记录学生试验过程。老师在后台评阅学生提交的实验报告,并根据实验报告内容,考核学生的试验情况给出实验成绩。
机器人ROS操作系统虚拟仿真实验指导书
1)实验目的
了解机器人ROS操作系统基本组成;熟悉机器人ROS操作系统的基本操作;掌握机器人ROS操作系统常用功能包的使用方法。
2)实验内容
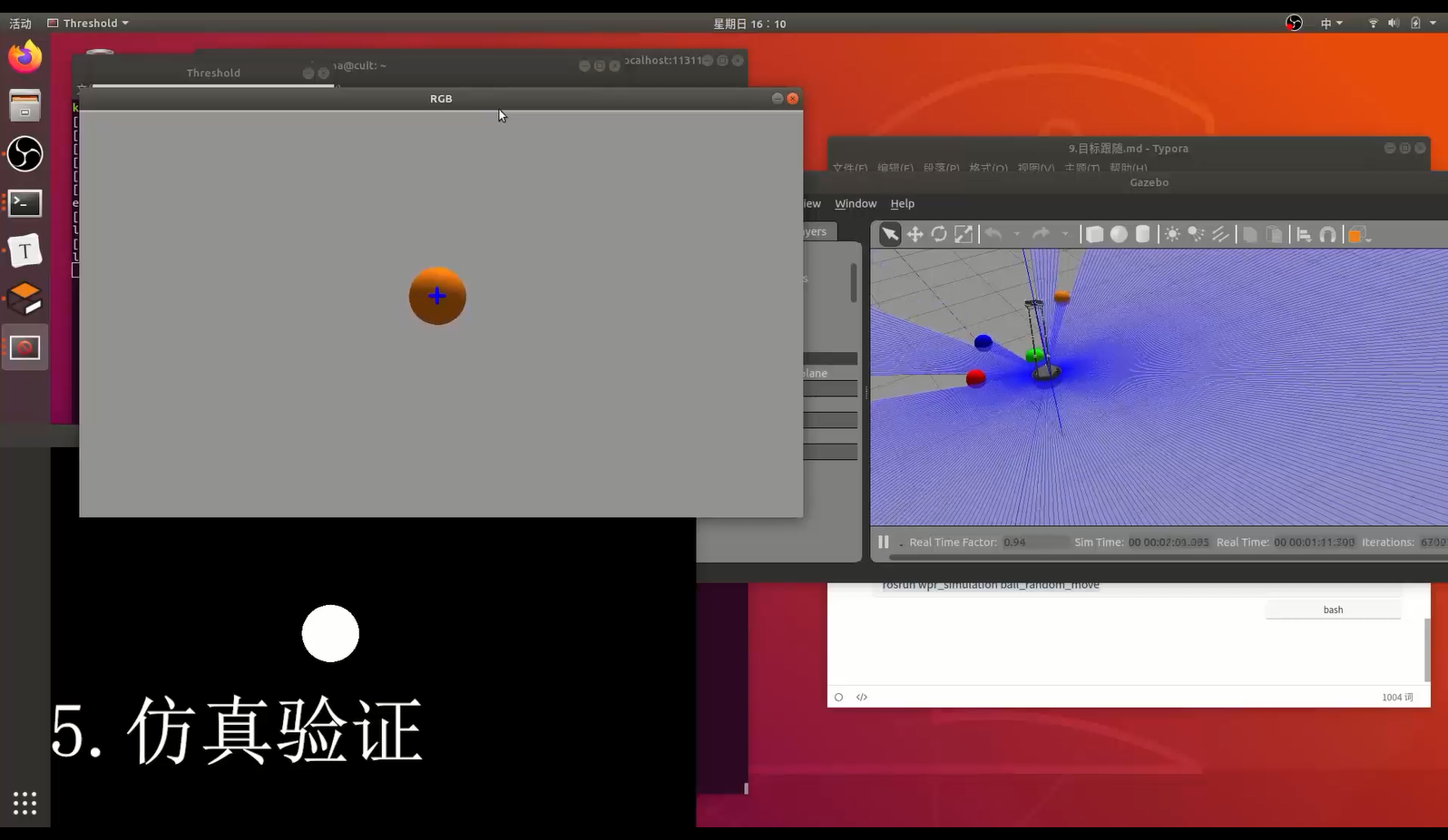
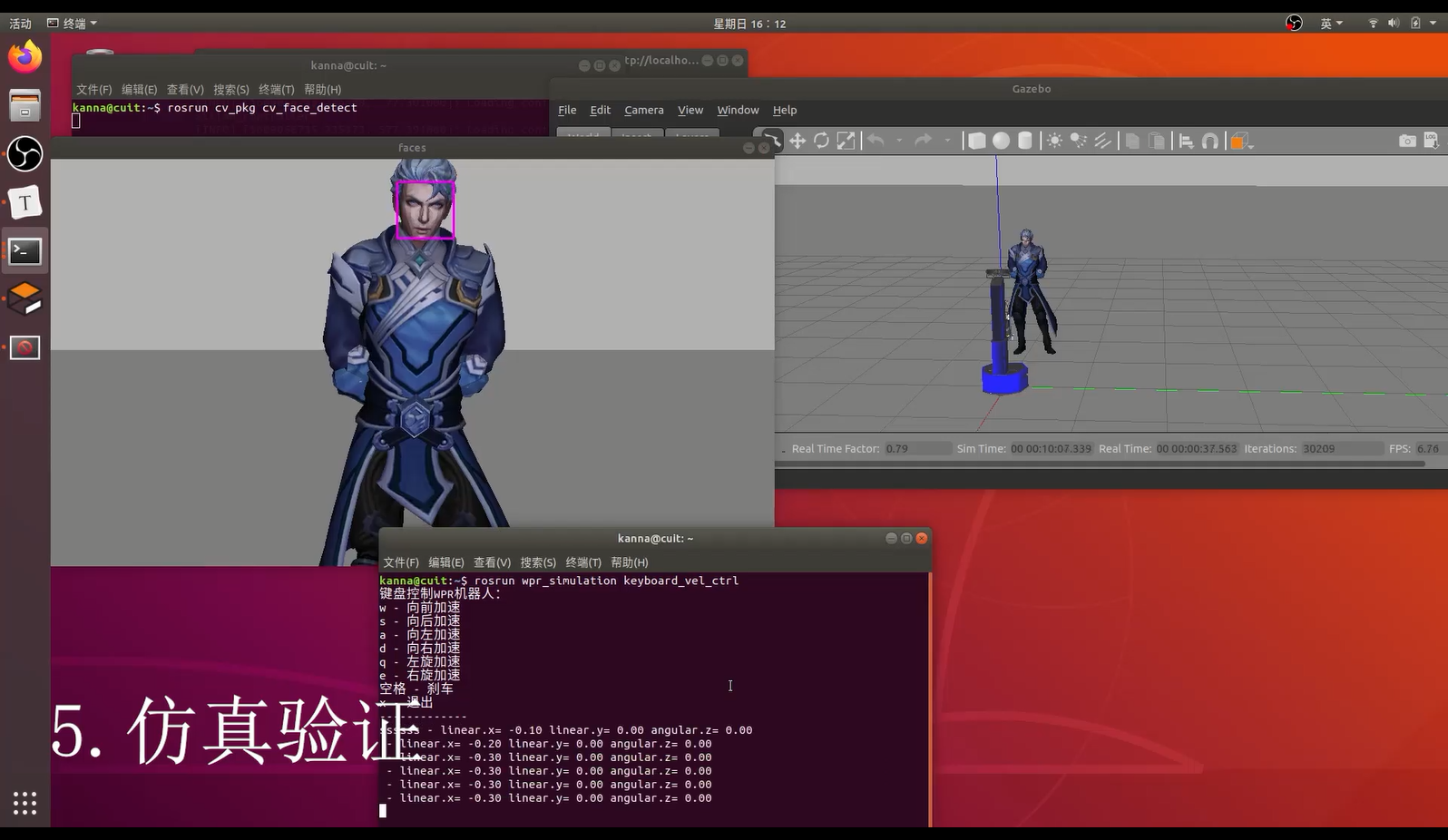
ROS安装、ROS仿真搭建、地图构建、导航、导航目标点保存、语音识别、基于OpenCV的图像采集、基于OpenCV的颜色特征提取和目标定位、目标跟踪和人脸识别。
3)实验原理
ROS为机器人提供了一个标准化的、开源的编程框架,是应用最广泛的机器人操作系统之一。该实验通过建立一些常用的机器人设备和环境的虚拟模型,可以灵活地搭建机器人装在的设备和工作环境,为学习ROS建立一个虚拟化开发环境,可以方便地调用基于ROS的开源软件功能包,进行多项基于ROS的机器人虚拟仿真实验。
4)实验方法与步骤要求
本实验的具体实验步骤请参考实验演示视频,其主要实验步骤概要如下:
① 安装ROS
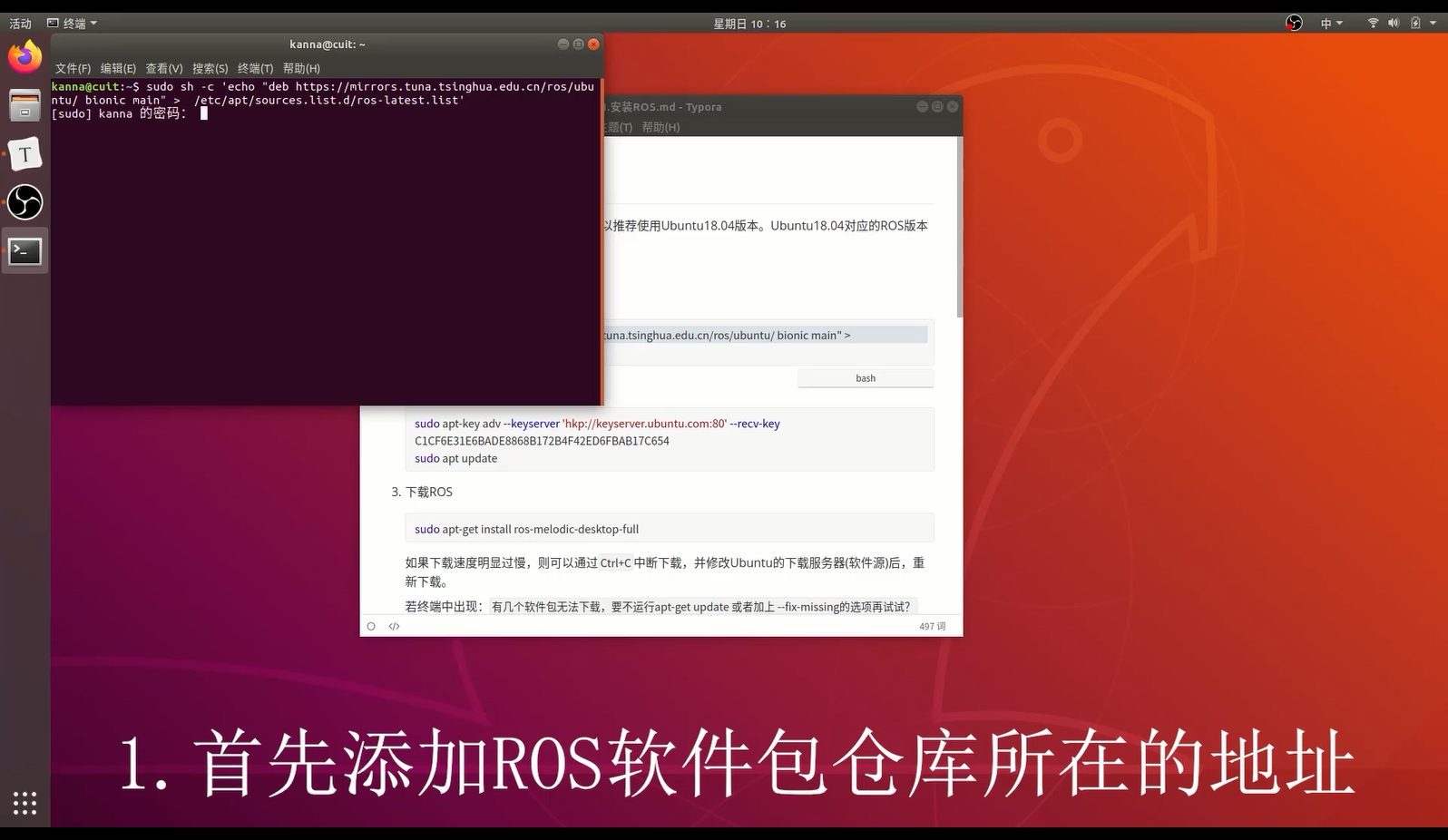
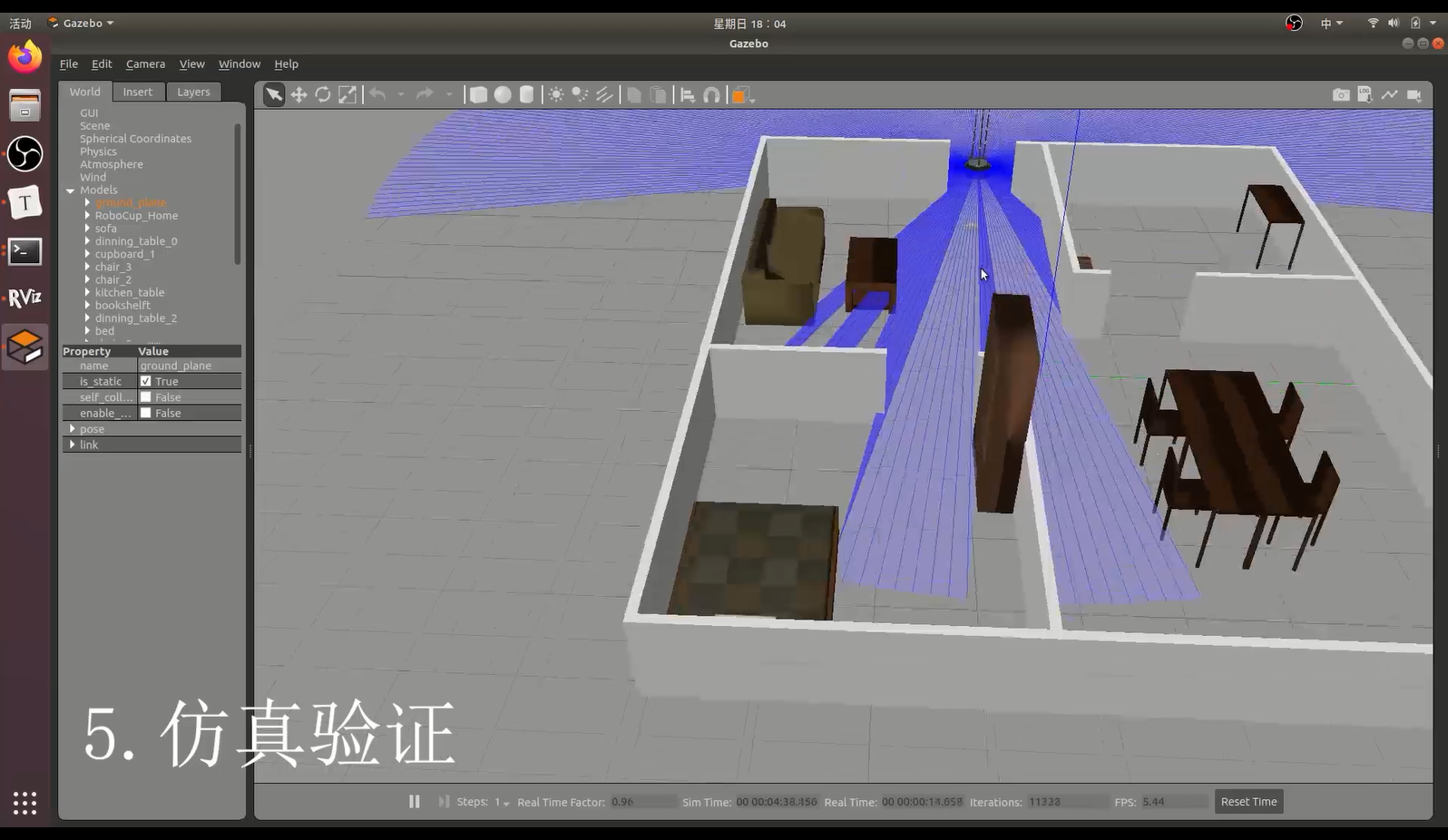
② 搭建ROS仿真环境
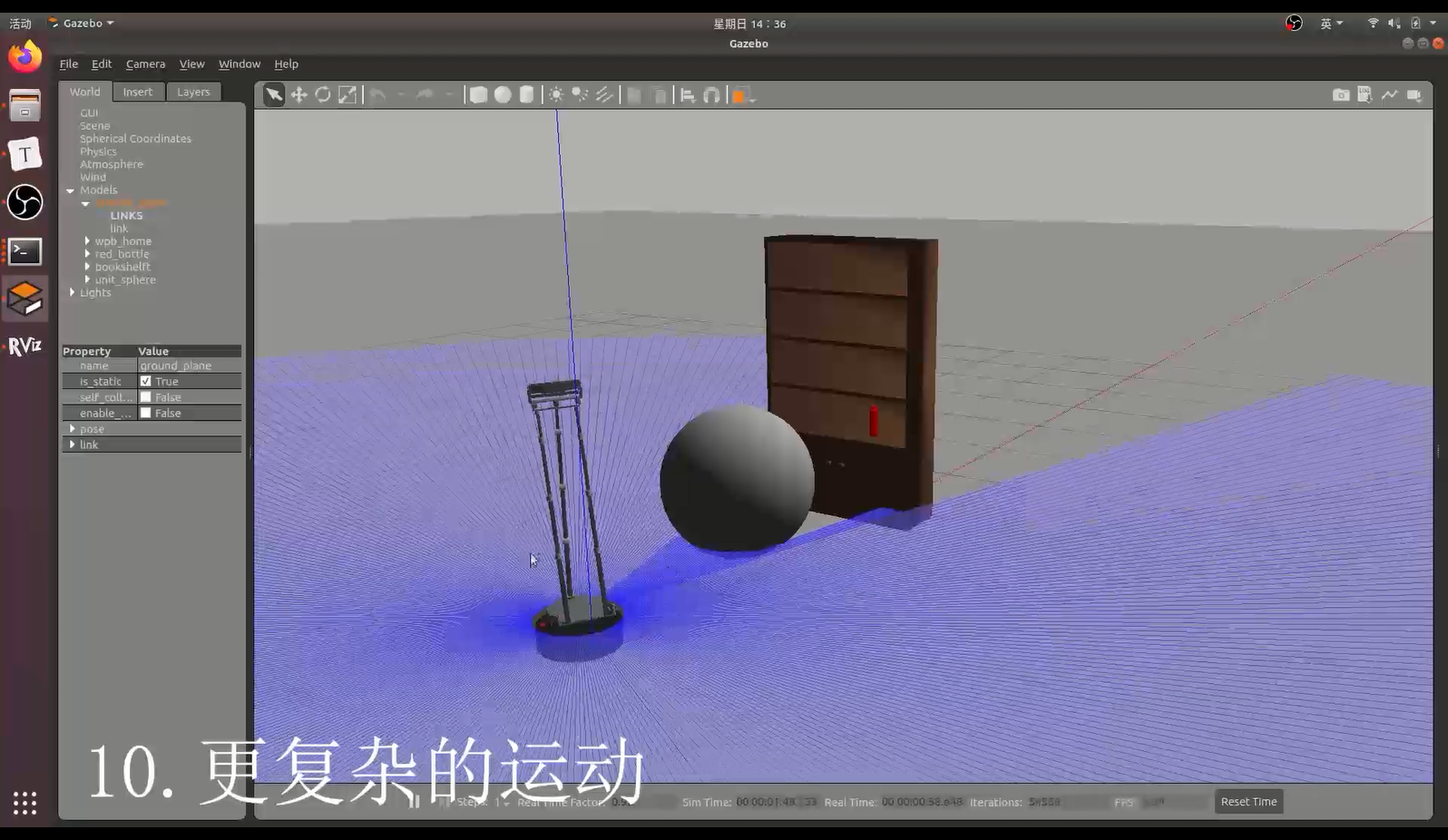
③ 搭建ROS仿真环境
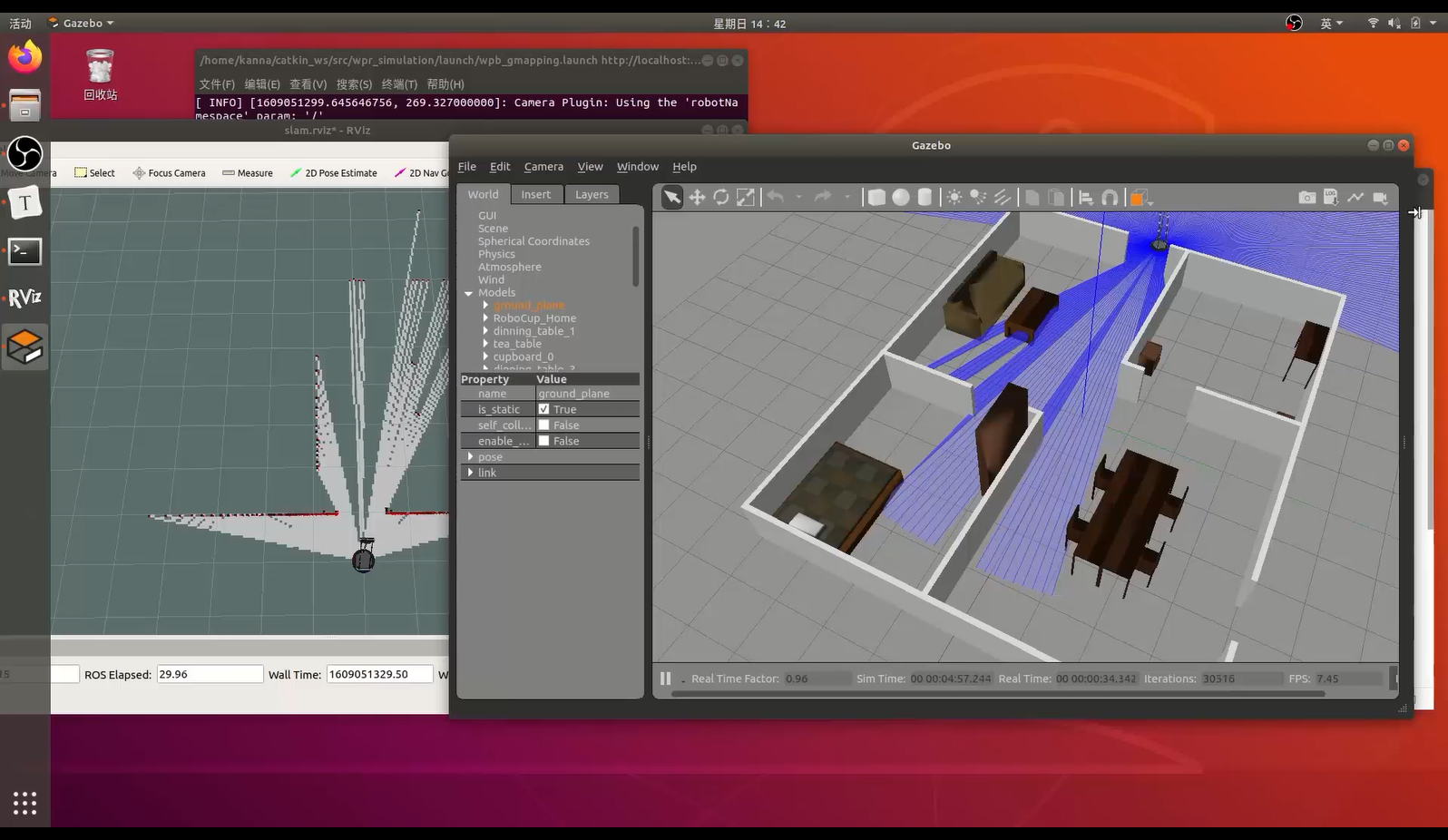
④ 搭建ROS仿真环境
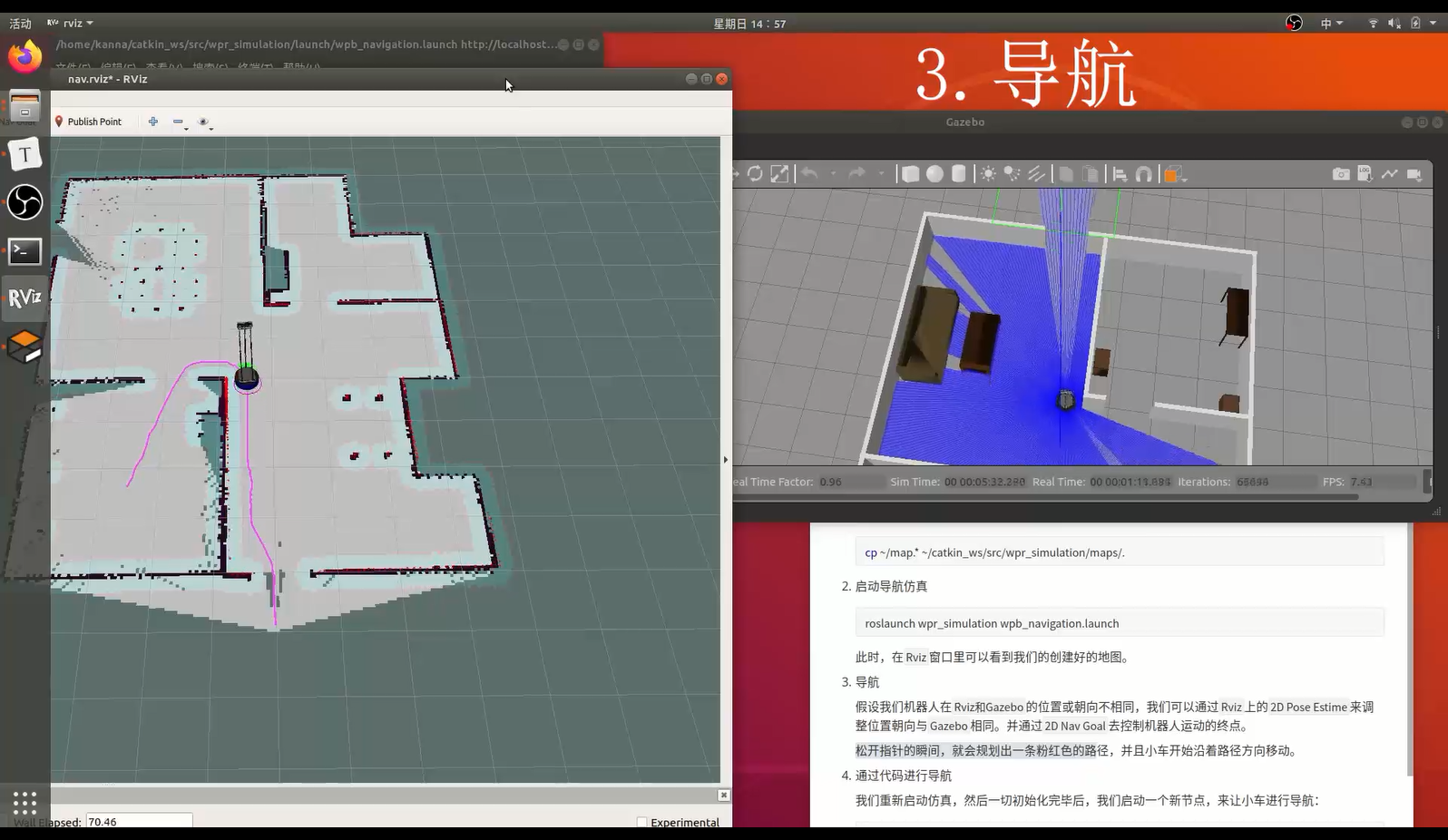
⑤ 导航目标点保存
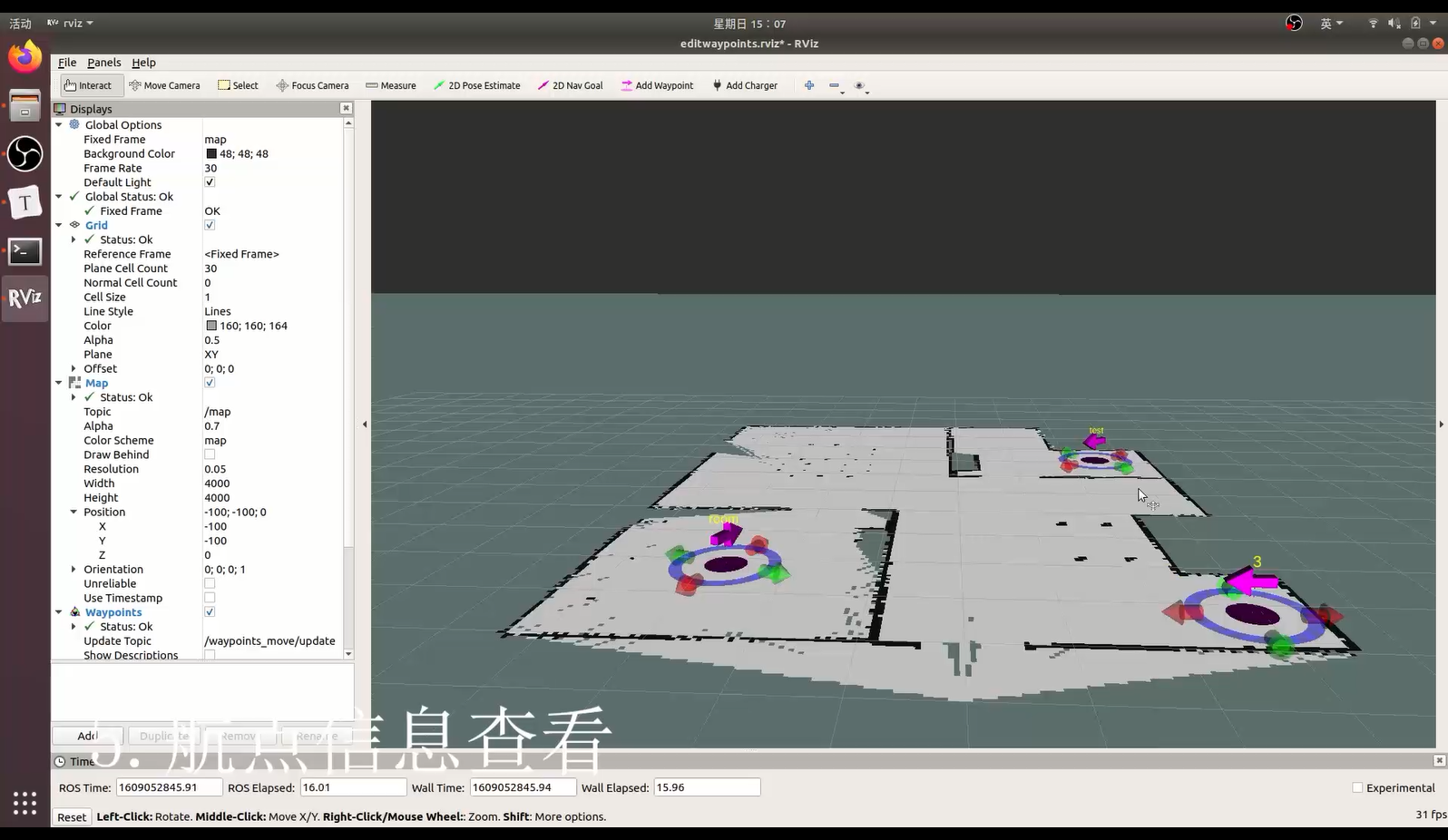
⑥ 语音识别
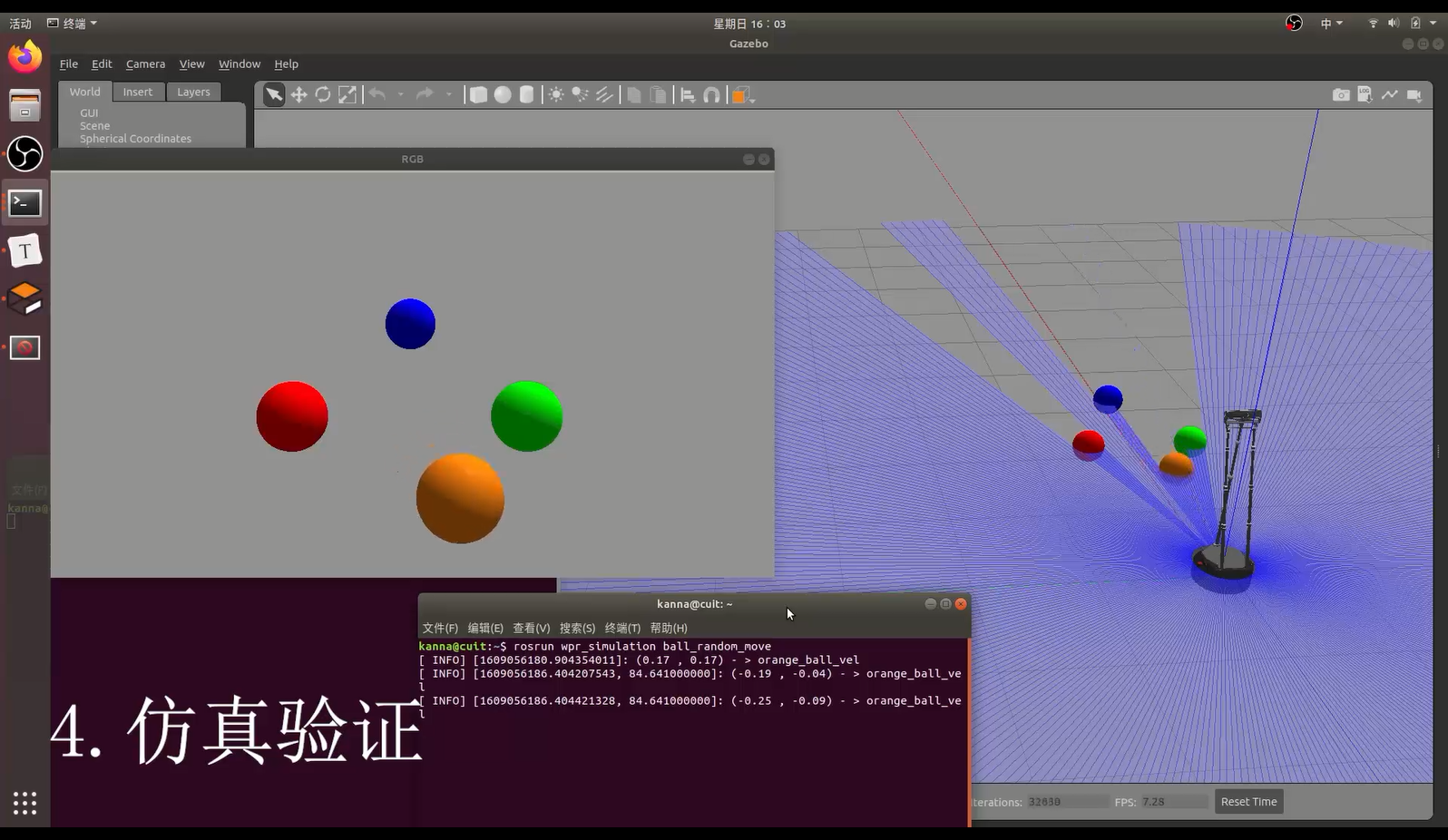
⑦ 基于OpenCV的图像采集
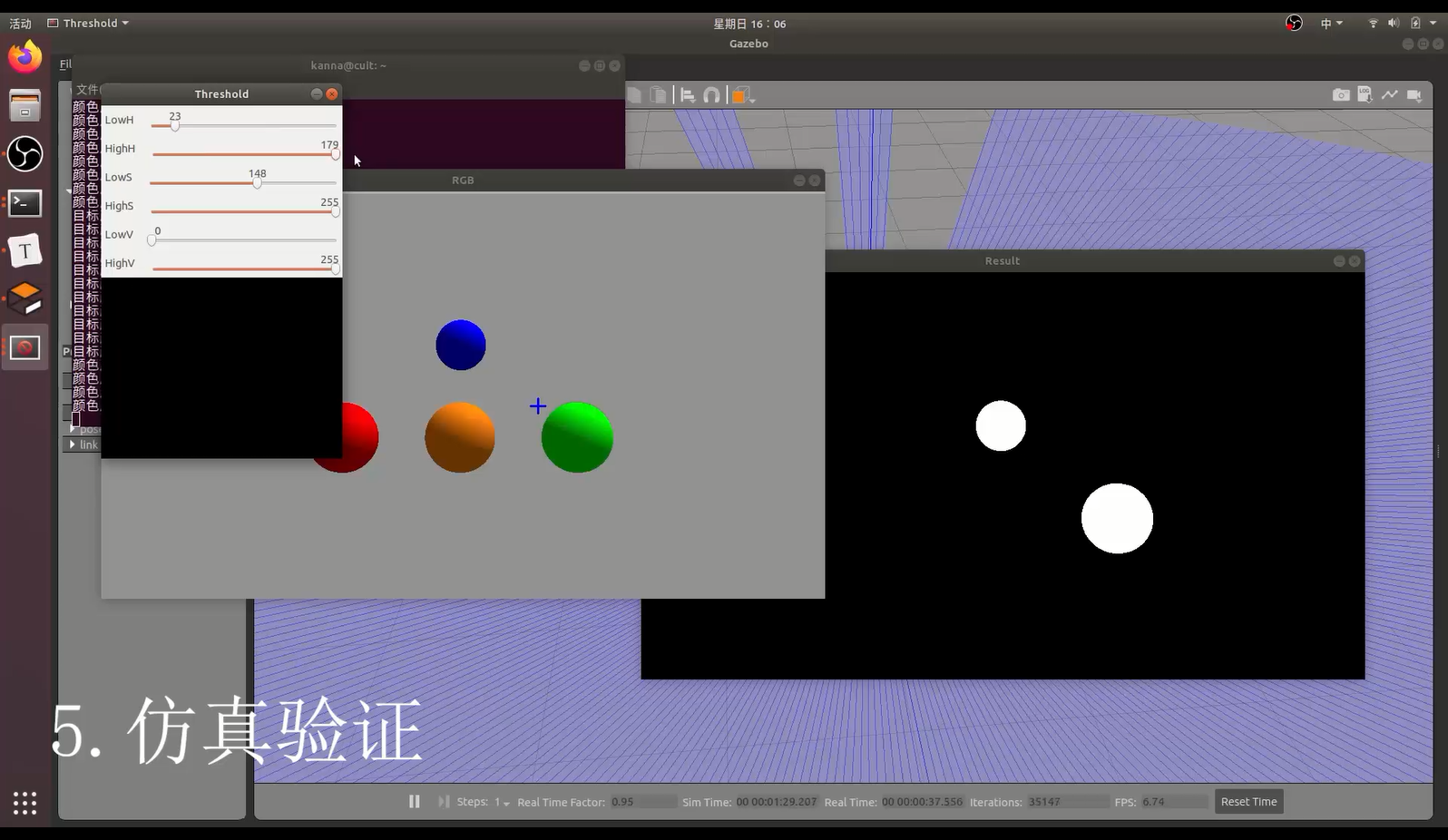
⑧ 基于OpenCV的颜色特征提取和目标定位
⑨ 目标跟踪
⑩ 人脸识别
5)实验结果与结论要求
§是否记录每步实验结果:R是 £否
§实验结果与结论要求: R实验报告£心得体会
§其他描述:
每个课程的实验项目都要求学生提供实验报告,实验报告中包括实验题目、实验目的及要求,实验基本原理、实验内容步骤,实验数据的处理等,数据完整。通过对实验数据的分析、论证,给出明确结论。
工业机器人轨迹规划虚拟仿真实验
1)实验目的
§了解关节空间和笛卡尔空间的概念和区别;
§了解关节轨迹规划的分类和原理;
§学会使用关节空间规划设计简单点动模型。
2)实验内容
§使用关节空间轨迹规划模块搭建一个点动模型,并进行数字仿真;
§学习使用控制机器人和外设的硬件模块;
§使用示例模型控制机器人运动。
3)实验原理
机器人轨迹是指随时间变化的一系列离散的机器人关节角度或者末端位形的集合。机器人的运动实际上是在一个时间间隔内发送给它一个位置指令,当时间间隔足够小(一般1ms~10ms)人就可以看成连续运动了。为了让机器人运动安全平稳,机器人的轨迹必须连续和光滑,这样才能让关节速度曲线连续或者光滑。如果轨迹不满足上述要求会导致机器人振动或者没办法达到期望的角度位置,因为过大的角度突变或者角速度突变,会因为惯性力(力矩)过大而导致电机输出功率饱和,无法提供足够大的驱动力矩到达期望的角度或者角速度。机器人的轨迹规划分为关节空间的轨迹规划和笛卡尔空间的轨迹规划。前者的用途一般是让机器人从初始位姿平滑地运动到目标位姿,它对运动过程中的机器人末端位姿是没有限制的;而笛卡尔空间的轨迹规划则是要求末端位姿在运动过程中满足一定的规则,比如走直线,走曲线,或者姿态保持不变等等。虽然笛卡尔空间规划更符合实际工业大多数场景用途,但是这个轨迹规划需要通过逆运动学方程求解对应的关节角度,才能真正让关节运动。这就必然遇到逆运动学的奇异解、速度不恒定和无解等问题,从而让它相对于关节空间轨迹规划更复杂。所以,这两种轨迹规划各有利弊。
4)实验方法与步骤要求
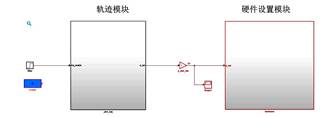
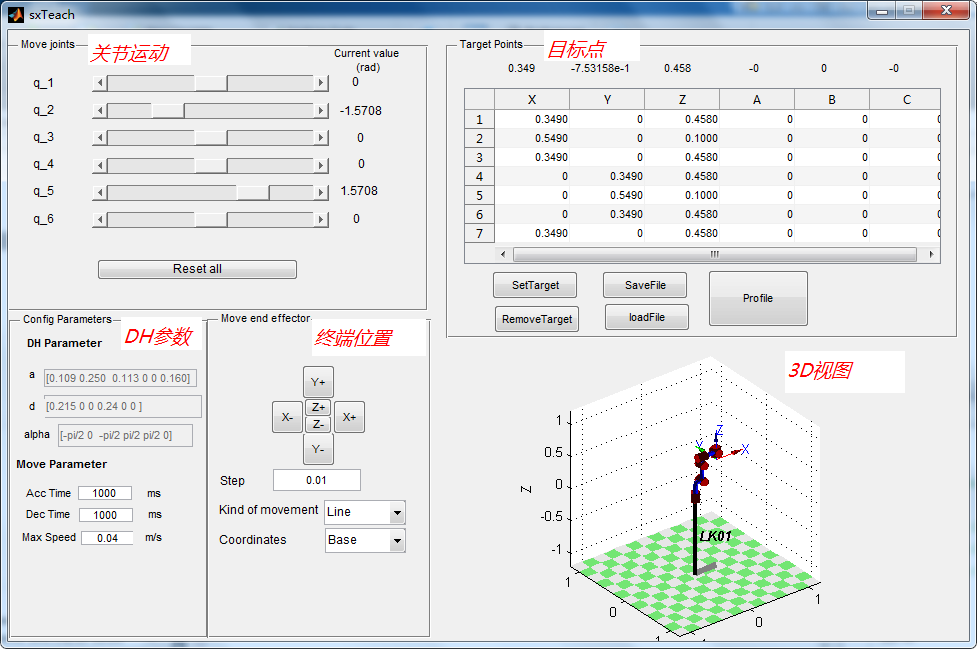
针对一个五次多项式关节空间规划,实现各个关节运动运动到一个指定的角度。这个模型包含两部分:轨迹模块和硬件设置模块。
① 启动脚本
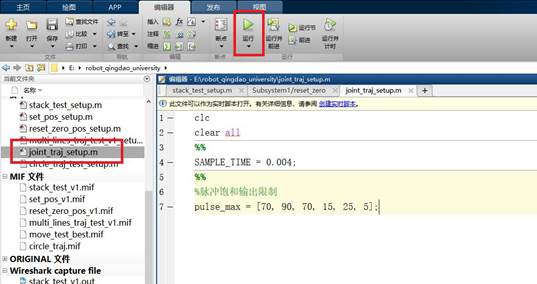
② 配置轨迹模块
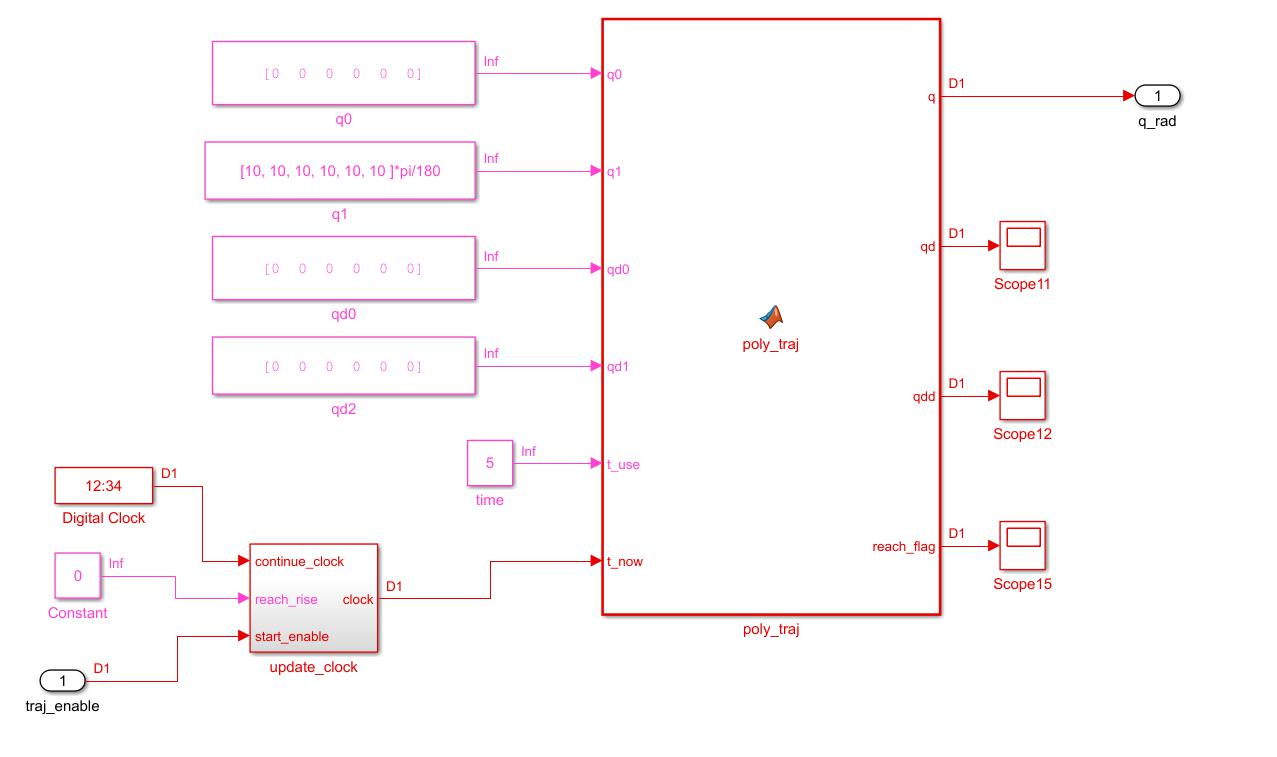
双击关节轨迹规划joint_traj子系统,如下图所示。其内部是一个五次多项式规划模块poly_traj,可以在运动模块库里Kinematic_Library直接找到。另外还有一个时钟更新模块update_clock,它的功能是在外部使能之后才开始计时。
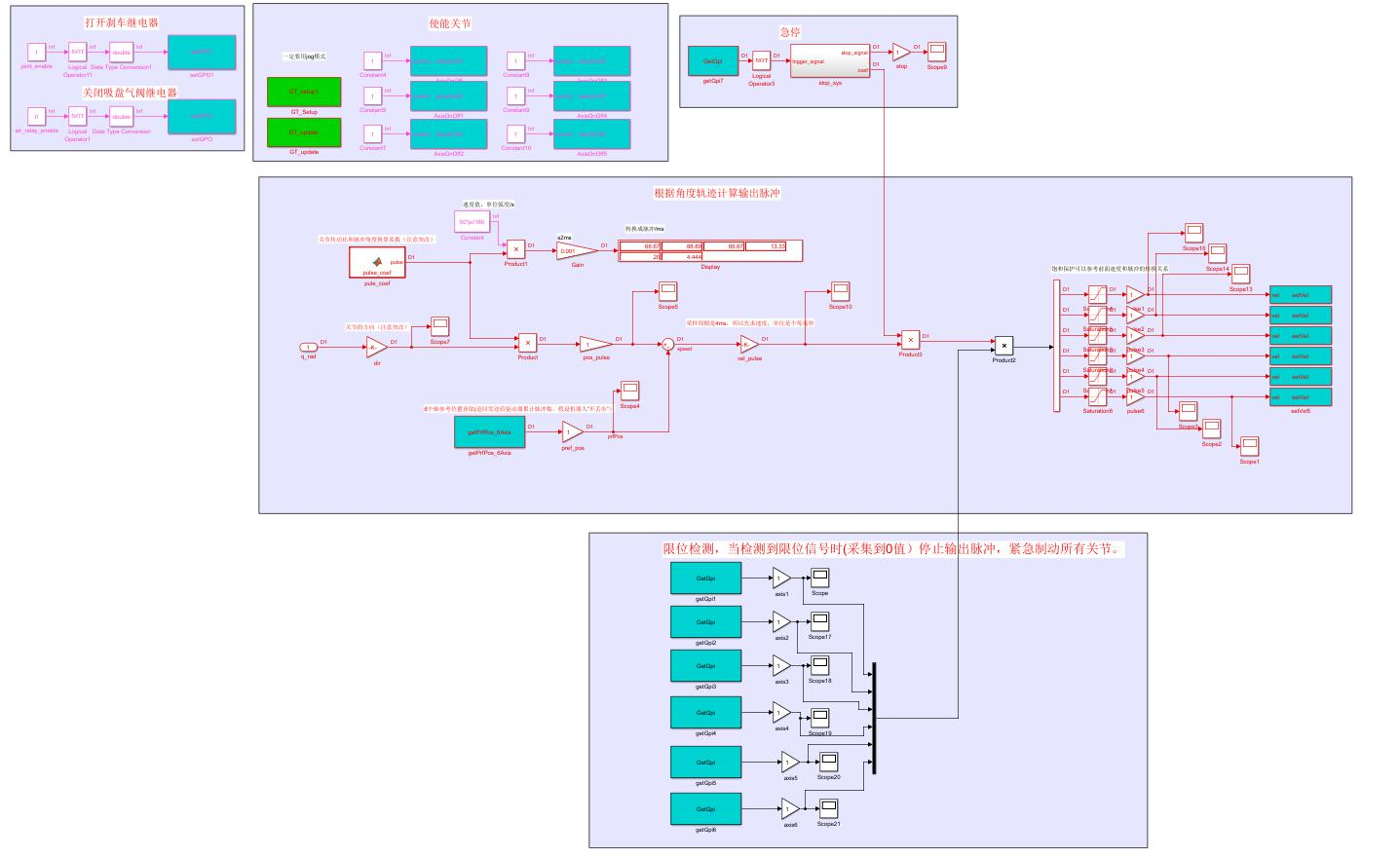
③ 配置硬件模块
硬件子系统里面包含了很多子模块,包括控制输入输出IO,运动控制卡设置的,关节运动数据发送的等等。各模块需要逐一进行参数配置。
④ 生成轨迹规划
⑤ 执行轨迹规划
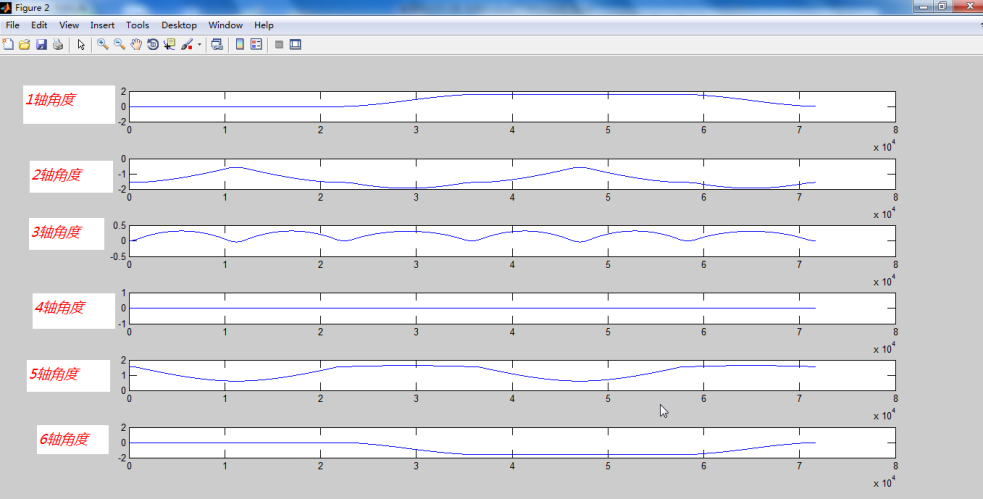
单击Profile按钮,执行轨迹规划操作,经过正逆解运算后,直接得到六个关节角度曲线。
5)实验结果与结论要求
§是否记录每步实验结果:R是 £否
§实验结果与结论要求: R实验报告£心得体会
§其他描述:
每个课程的实验项目都要求学生提供实验报告,实验报告中包括实验题目、实验目的及要求,实验基本原理、实验内容步骤,实验数据的处理等,数据完整。通过对实验数据的分析、论证,给出明确结论。
 四川省无人系统虚拟仿真实验中心
四川省无人系统虚拟仿真实验中心
