《运动控制系统》课程实验指导
一、课程基本情况
课程名称 |
运动控制系统 |
课程类别 |
■核心 □必修 □任选 □限选 |
学分 |
3.5 |
执行学期 |
5 |
课程学时 及其分配 |
总学时 |
学时分配 |
56 |
讲授 |
48 |
实验 |
8 |
上机 |
0 |
实习 |
0 |
|
|
|
|
|
二、课程性质与作用
《运动控制系统》是一门讲授交、直流电动机控制理论和控制规律,以提高电能利用效率及运动控制品质的一门专业主干课程,在机器人运动控制系统设计中尤为重要,是机器人工程专业的一门核心必修课。本课程秉承理论与实际相结合的理念,应用自动控制理论解决运动控制系统的分析和设计问题,以转矩和磁链(或磁通)控制规律为主线,由简入繁、由低及高地循序深入,论述系统的静、动态性能。
通过本课程的学习,要求学生能够了解运动控制系统的定义、结构及其分类,理解运动控制的必要性,其目的是使学生以电磁原理为基础,掌握直流、交流以及步进电机的控制系统的基本结构、工作原理和性能指标,同时掌握直流和步进电动机的驱动与控制,并能够实现电动机的闭环以及脉宽调速系统的设计,最后还需掌握液压与气压传动系统的结构和原理,及其在机器人中的应用,初步实现对机器人的运动控制。本课程着重培养学生对运动控制系统的综合分析能力和工程设计能力,从而掌握现代交、直流电动机的控制理论和系统设计方法,为今后从事专业工作打下扎实的基础。
三、实验教学内容与安排
项目序号 |
项目名称 |
项目内容 |
项目学时 |
项目类型 |
每组人数 |
备注 |
1 |
直流电机系统速度控制研究 |
1、完成直流电机仿真平台的搭建。2、完成直流电机的开环控制、闭环控制。 |
4 |
验证实验性 |
2 |
|
2 |
双闭环直流调速系统仿真 |
理解掌握机器人速度控制性能要求,理解双闭环直流调速的基本原理和仿真方法; |
4 |
验证实验性 |
2 |
|
实验二直流电机系统速度控制系统研究与仿真
一、实验目的
1、通过搭建直流电机仿真平台了解电机调速系统的仿真系统;
2、掌握直流电机开环控制、闭环控制原理,实现直流电机的稳定调速仿真。二、实验设备
1.微型计算机;
2. Matlab软件。
三、实验任务与要求
实验任务:
1、完成直流电机仿真平台的搭建。
2、完成直流电机的开环控制、闭环控制。
实验要求:
1、在搭建直流电机仿真平台时,总结仿真构建中出现的问题;
2、构建过程中注意matlab/simulink方法,最终完成开环、闭环控制接头图;
实验过程主要以仿真为主,大家多测试和多思考。
四、实验内容及步骤
(一).采用matlab实验平台;
(二).实验原理
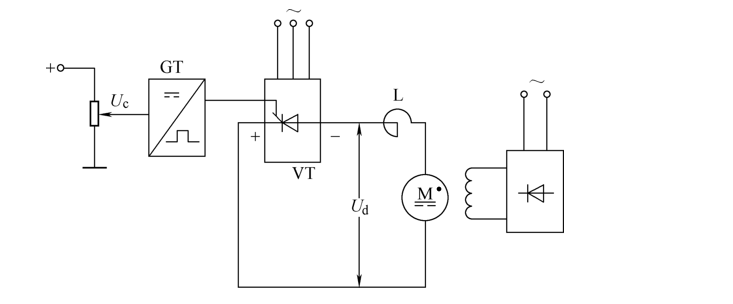
(1)电动机调速系统
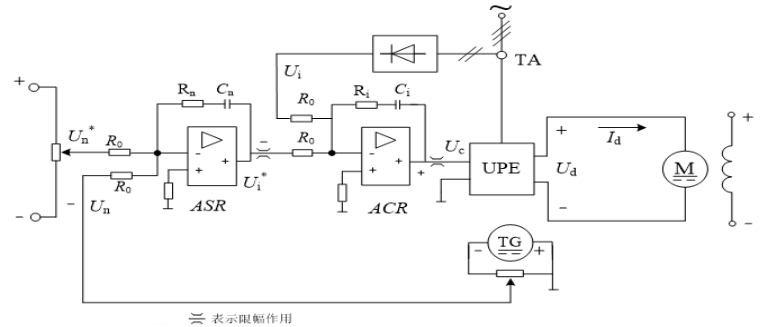
(2)双闭环直流系统
(三).实验步骤
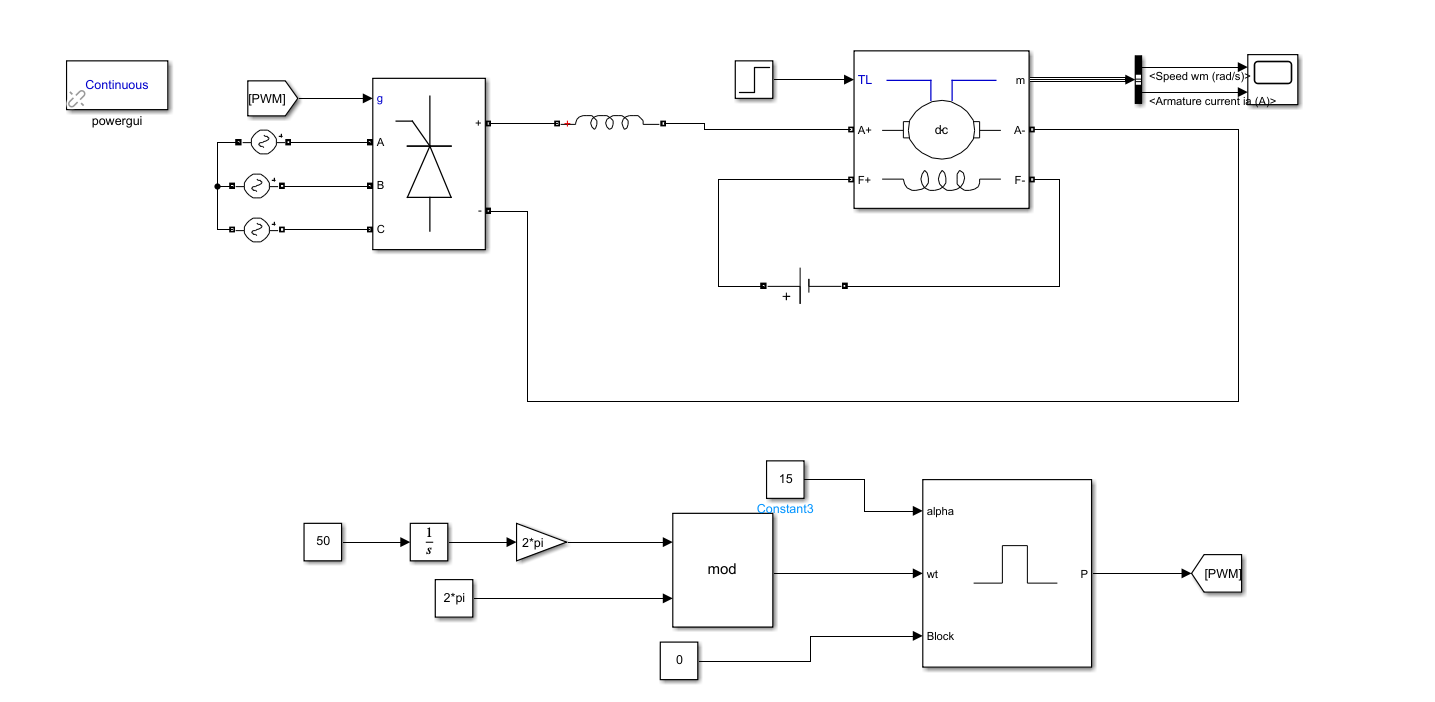
直流电机开环调速系统:
(1)首先在平台中选择powergui,模式选择23t,其余参数默认。
(2)电源部分选择交流电压源,幅值220V,初始相位0度,50Hz,共选择三个交流电压源,其角度相差120度。
(3)选择三相晶闸管,参数Snubber capacitance改为250e-9,Forward voltage改为0.8,将晶闸管与电源部分连接。
(4)选择电力电子变换器、直流电机,选择默认参数,负极相连,为电机电源选择220V直流。加入阶跃,从第2s开始由50越变到100。
(5)搭建开环部分PWM信号:选择比例积分模块,比例模块参数为2Π,选择Math Functon模式为mod,选择PWM信号脉冲触发器(6脉冲),导通角自行修改。
(6)搭建波形,观察转速及电枢电流。
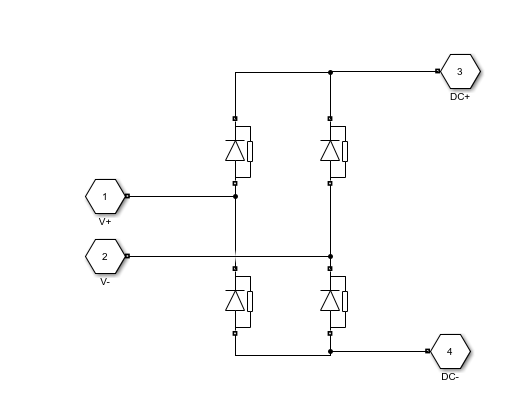
(7)搭建整流桥观测波形:输入端交流电,输出端直流电,选择Connection Port分别命名为V+、V-、DC+和DC-,注意left和right,将该模块生成子系统,如图所示:
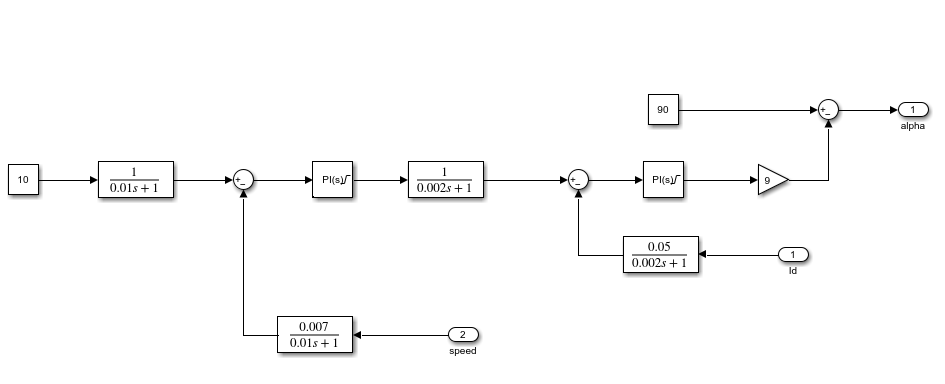
(8)在开环调速的基础上搭建双闭环调速系统:需要转速调节器和电流调节器,传递函数为1 /(0.01s+1),需要比较点、PI调节器,Kp设置为11.7,Ki设置为11.49,以上为转速调节器。再加入传递函数为1/(0.002s+1)、比较点及PI调节器,调节Kp为1.013,Ki为33.33,以上为电流调节器。电机给定130,不用阶跃信号。

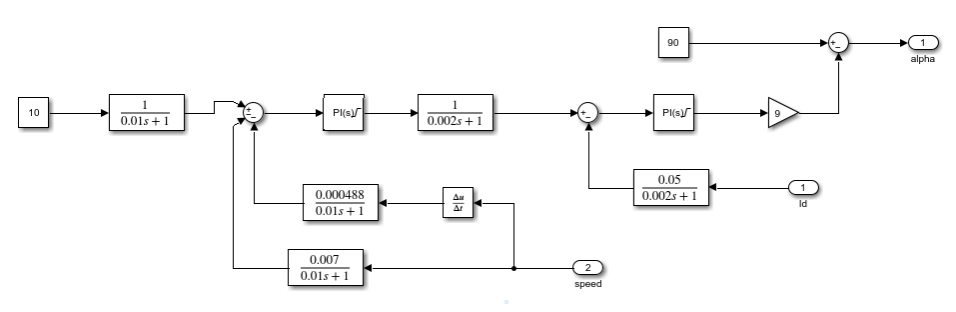
(9)加入微分环节对比。微分环节需要多加入一个比较点进行处理,加入du/dt即微分环节。形成转速上的微分,传递函数参数调整为0.000488/(0.01s+1),将其加入比较环,如图所示:
五、实验结果
1.报告内容:
1)实验目的。
2)实验内容及步骤。
3)实验调试结果及其分析。
4)实验总结
2.报告要求:
完成实验报告,打印后提交纸质版(电子版)。完成实验后一周内提交。
六、思考题
通过建立直流电机转速、电流双闭环调速系统数学模型设计,根据具体指标参数,应用工程方法设计了电流调节器和转速调节器,设计中选择合适的调节器类型,给出了系统动态结构图并进行了仿真和性能分析。利用MATLAB及其中的仿真工具Simulink,对所设计的电流环和转速环进行了仿真计算。如何持续优化仿真过程。
 四川省无人系统虚拟仿真实验中心
四川省无人系统虚拟仿真实验中心
